-
机器人三维切割机器人工作站
【导语】过去的一年,对IT分销的考验更加严峻,IT厂商巨头通过各种手段竭力与终端经销商、直接用户拉进距离,压缩渠道空间,而电商技术及平台的发展加剧了这一变化。大型分销商在传统分销领域越来越难挣到钱,导致业务疲软甚至倒退。数码在分销行业发生剧变的大形势下,围绕核心的渠道分销业务大胆创新,积极调整业务架构、争取有利资源的同时为上下游定制应需而变的服务,保持了20%以上的快速增长
2026-02-04
-

机器人3D激光切割
山水最新推出的一款全新二代升级版智能健康手环H2,天猫首发价3折仅需158元,买就送山水正品移动电源一台,数量有限,先到先得哦。山水全新一代健康智能手环H2,经典简约欧美风设计,顶级高技术含量,进口高品质选材,全面实用健康功能给众多热爱健康,钟爱智能手环的朋友们带来惊艳之喜。山水H2天猫首发仅3折抄底价158元疯抢,心动的朋友可狠戳品牌聚划算活动进行限量抢购,目前已有上千名心动买家参
2026-02-04
-

机器人和机械手在工业应用中有什么区别
机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自
2021-03-03 aipaae
-
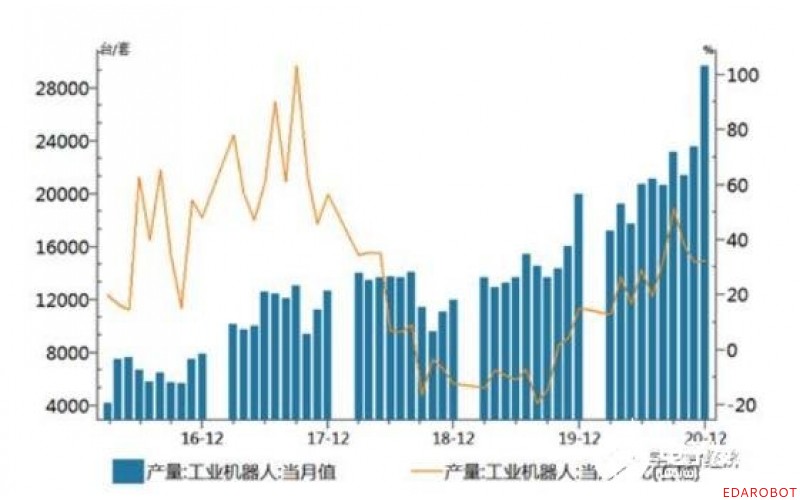
工业与机器人的需求发展
今天看到一篇担心我国去工业化的文章,分析得不无道理。从2010年以来的10年时间里,我国第二产业占经济的比重从46.5%下降到37.8%,而同期第三产业比重从44.2%上升到54.5%。往好的方面讲,经济结构从第二产业向第三产业升级;往坏的方面讲,第二产业萎缩速度过快,意味着产业空心化。毕竟我国还不是高收入国家,仍然需要制造业立国。从细分行业来看,制造业比重萎缩已经表现得较为明显。工业是我国第二产
2021-03-03 aipaae
-
![工业机器人本体制造商和系统集成商的区别是什么]()
工业机器人本体制造商和系统集成商的区别是什么
工业机器人产业链中,为什么还会细分出本体制造商和系统集成商?两者都有哪些区别?今天我们来谈谈这个问题。1、产业链不同机器人本体厂商主要是生产机器人本体,负责机器人关键零部件生产、控制算法、开发环境设计等工作。但机器人不能直接投入使用,还需要与视觉、力觉等各种传感器,流水线、机床等各种关联设备配合使用,这就是集成商需要完成的工作。2、技术壁垒不一样机器人本体制造处处都有技术壁垒存在,如减速机、伺服电
2021-03-03 aipaae
-
![发那科最新机器人技术汇总]()
发那科最新机器人技术汇总
FANUC将携13套领先的焊接与切割解决方案亮相2019埃森展,全新智能机器人、2D视觉、3D视觉、激光寻位、激光跟踪焊接、物联网技术…全新智能机器人M-10iD/10L将首次在中国地区亮相!M-10iD/10L可搬运质量10kg、重复定位精度±0.03mm、可达半径达到了1636mm。凭借独特的齿轮驱动机构,实现高惯量的运动特性。机器人采用电缆内置式手臂设计,同时,高刚性手臂实现了机器人高速、高
2021-03-03 aipaae
-
![怎样打造一个完美的焊接机器人焊接工装夹具?]()
怎样打造一个完美的焊接机器人焊接工装夹具?
智能制造和大数据时代来临,很多的焊接生产加工等工作都依靠使用焊接机器人或者机械臂来完成,对于企业来说有面临由手工向自动化焊接转型的需要或者是现有的自动焊接方式不够完善,其中涉及到的焊接夹具设计问题,下面向大家解读怎样打造一个完美的焊接机器人焊接工装夹具?1、焊接机器人焊接夹具具有动作迅速、操作方便的特点,操作位置应处在工人容易接近、最易操作的部位。当机器人焊接夹具处于夹紧状态时,应能自锁。 2、
2021-03-03 aipaae
-
![EDAROBOT拖拉机架焊接机器人]()
EDAROBOT拖拉机架焊接机器人
本机器人焊接系统可以 24 小时连续作业,跟人工作业相比,其效率、质量、稳定性等有很大提高。 该系统配置主要由 1 台弧焊机器人、1 套美国林肯焊接电源、3 套单轴头尾架焊接变位机、1 套机器人水冷焊枪系统、1 套机器人地轨 C 型梁滑台系统、1 套清枪剪丝装置、4 套工装夹具、1 套集成控制系统等组成。 整套焊接机器人系统特点: 1、该机器人焊接系统带有起始点寻位、电弧跟踪、多层多道等弧焊软件包的功能,可以有效解决工件组対误差问题。工件采用分四序焊接的方式,可以显著提高工件的可焊率,减少人工的补焊量。
2021-02-09


